14. 案例 05: 車速檢測器¶
程度: 
14.2. 背景¶
甚麼是車速檢測器?
檢測系統能根據車輛在一定時間內移動距離得出其車速。 安裝檢測系統用以檢控有效減少交通意外發生。
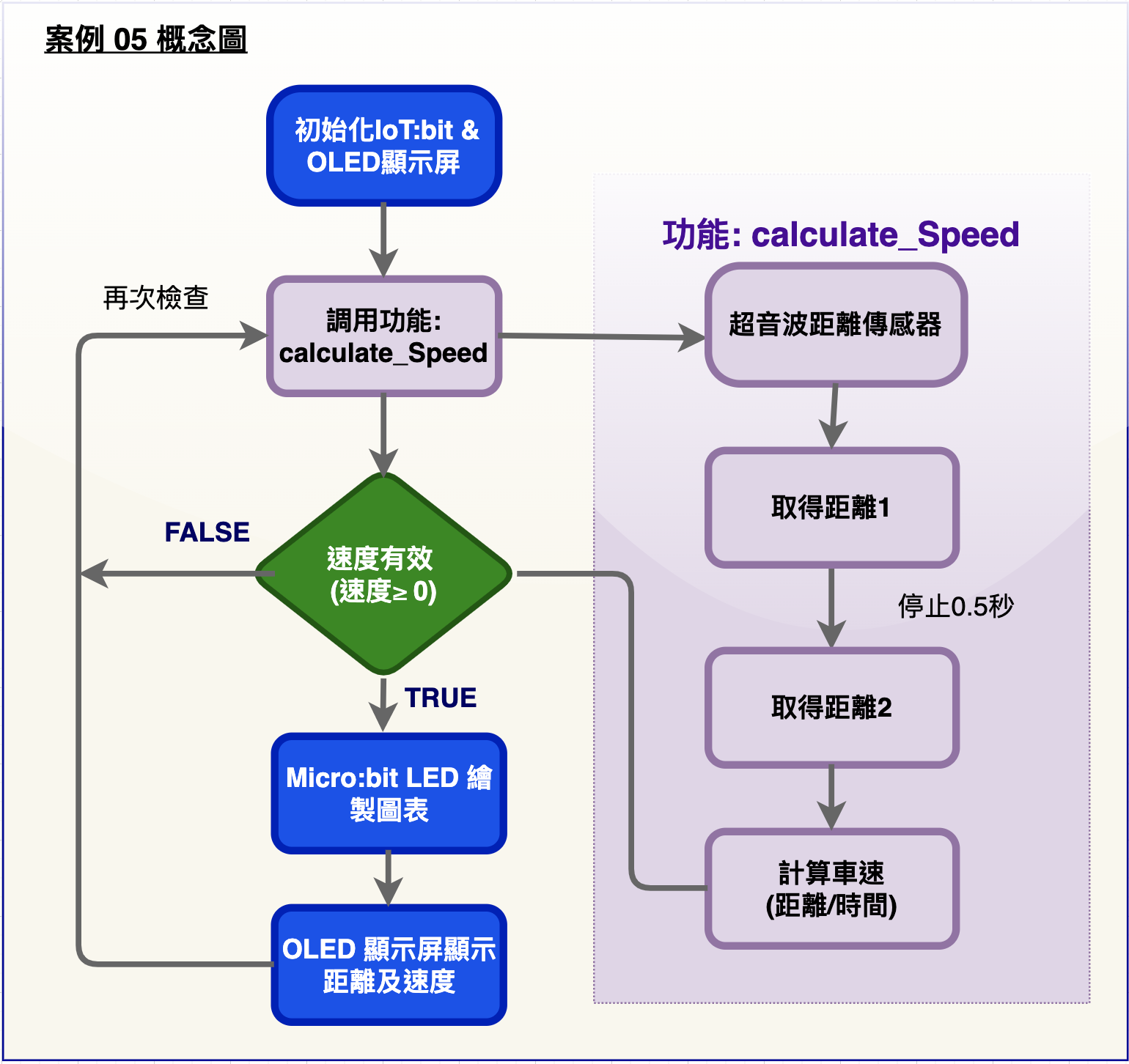
運作原理
超音波距離傳感器可以在兩個時間點測量車輛與其之間的距離,從而計算其速率。
每 0.5 秒,傳感器會量度車輛與其之間距離。
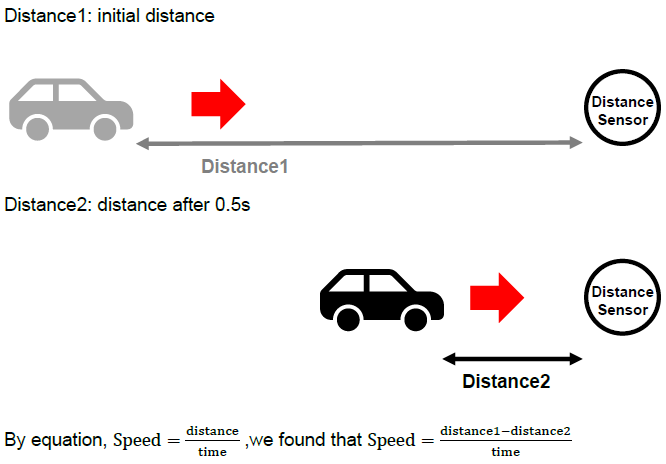
根據物理學,速率 = (距離一 – 距離二), 這時候可得知有三種情況。
距離一 > 距離二.. 車輛正靠近
距離一 = 距離二.. 車輛已停止移動/路面沒有車輛
距離一 < 距離二.. 車輛正轉向/駛離,此情況無視
這速率可以在 micro:bit LED 以圖表表達車速..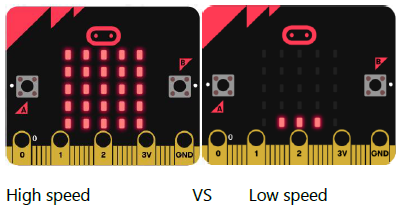

14.4. 組裝步驟¶
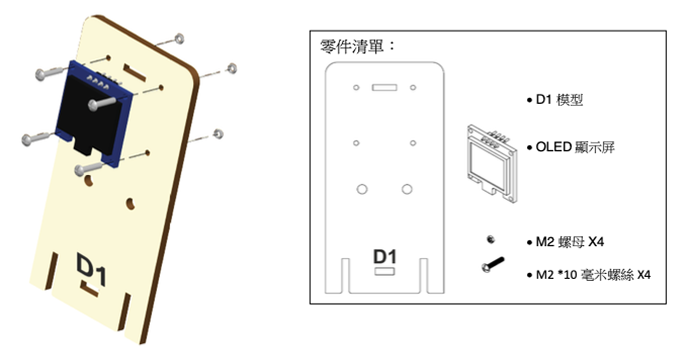
步驟一
用 M2*10 毫米螺絲及螺母把 OLED顯示屏 組裝到 D1 模型上。
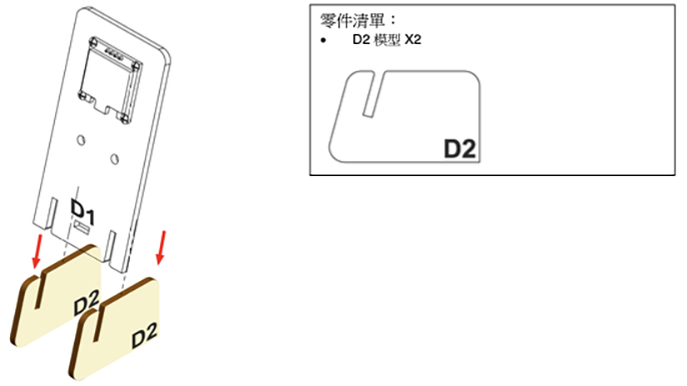
步驟二
組裝 D1 和 D2。
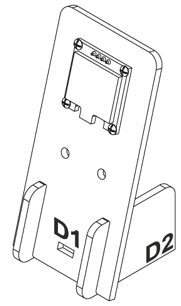
步驟三
底座組裝完成!
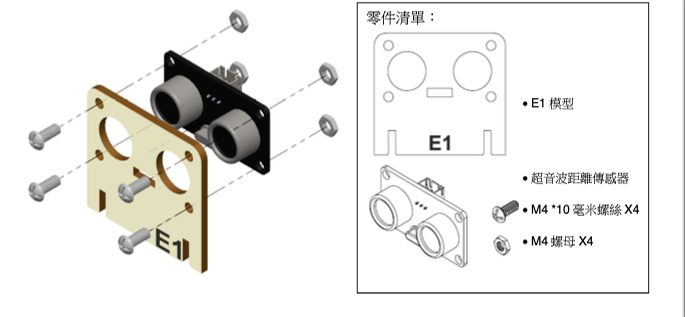
步驟四
用 M4*10 螺絲及螺母把超音波距離傳感器組裝到 E1 模型。
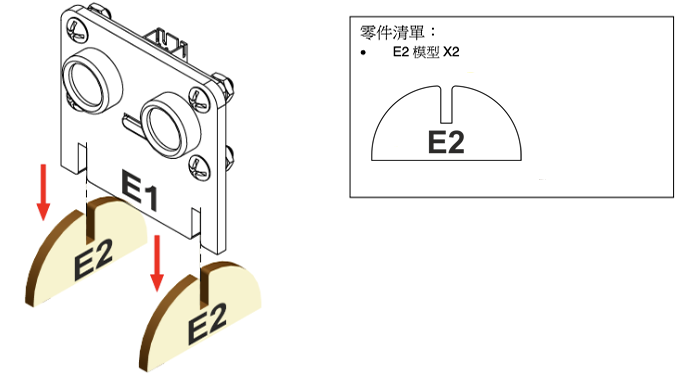
步驟五
組裝 E1 和 E2 模型。
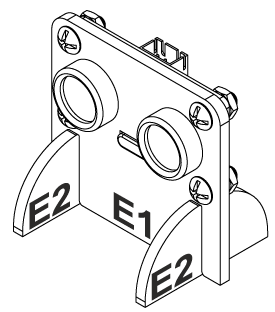
步驟六
組裝完成。!
14.6. 編程 (MakeCode)¶
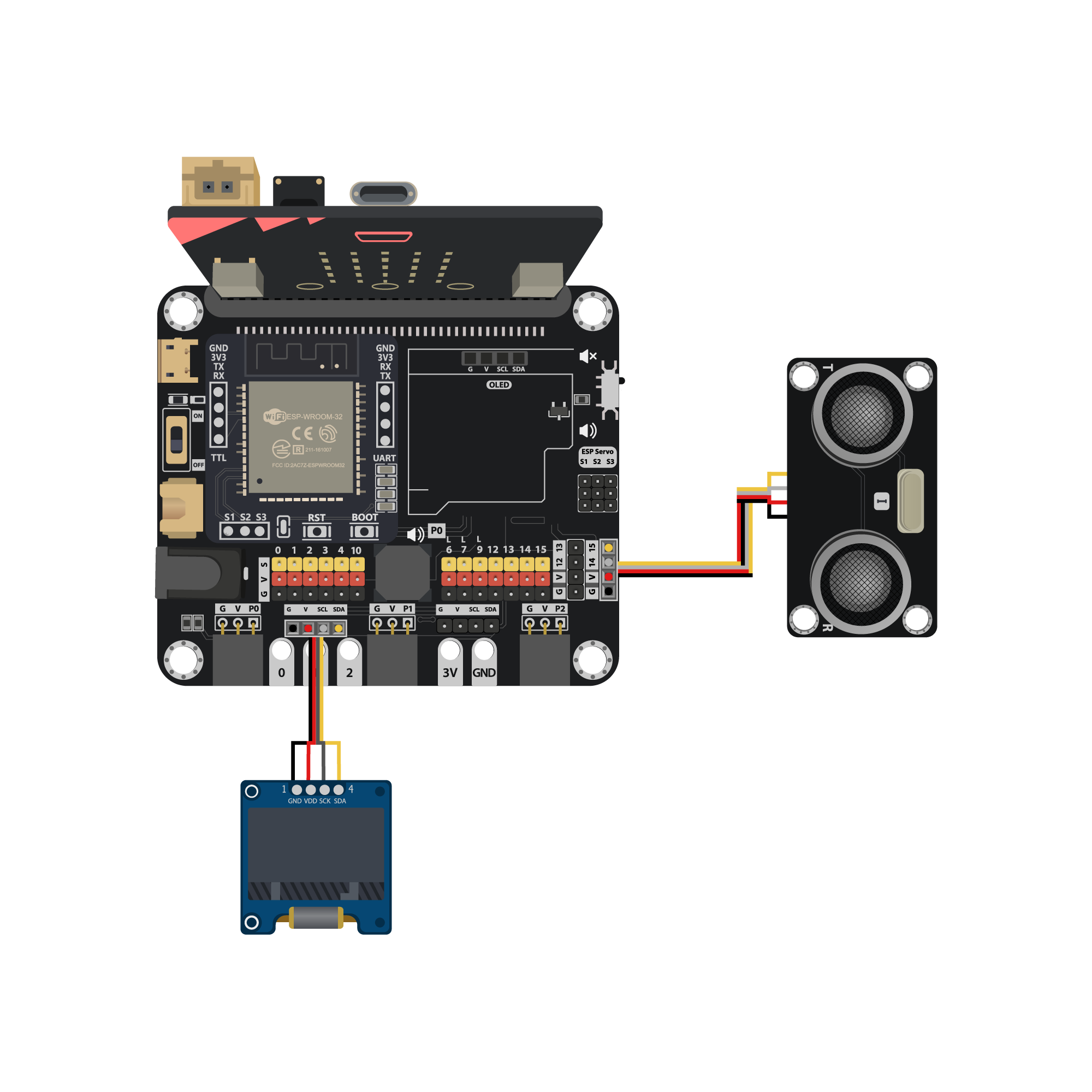
步驟一. 啟動 OLED 顯示屏
初始化OLED顯示屏(128闊64高)
宣告新變數
distance1,distance2,speed為0
步驟二. 宣告函式(calculate_Speed)
在進階模塊「函式」宣告新函式
calculate_Speed從
取得距離...中取得數值,分別放入distance1和distance2根據速率公式,設
speed為”(distane1 – distance2) / 0.5”
步驟三. 計算車速
在「重復無限次」叫喚
calculate_Speed加入”如果…那麼”,”speed ≥ 0”為前設
在邏輯中加入
點亮長條圖 顯示值為 speed 最大值為 20加入
清除顯示,新行顯示字符串(Distance1: distance1),(Distance2: distance2), (Speed: speed)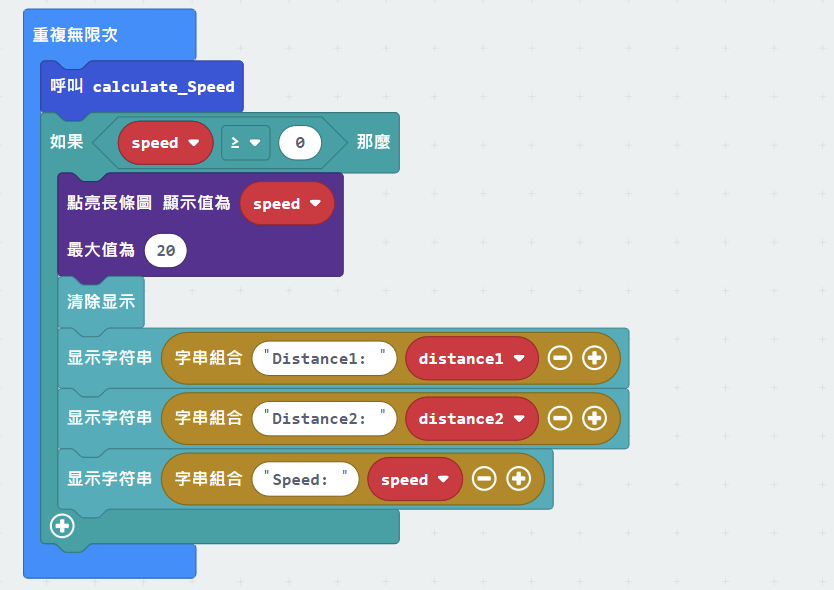
完整答案
MakeCode: https://makecode.microbit.org/_Ro5fAyhMdRvX
你可以在以下網頁下載HEX檔案: